 |
Figure source:
B. Bequette, Process control: modeling, design. and simulation, Prentice Hall Press, Upper Saddle River, NJ 2002
|
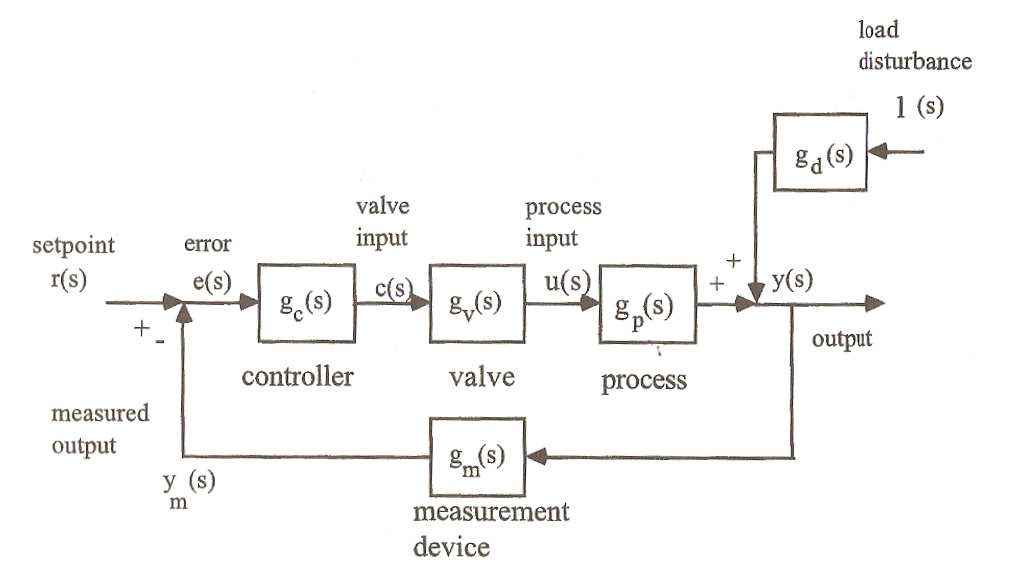
Block diagram
(Laplace domain) variables:
c(s) = controller output
e(s) = error
r(s) = setpoint (reference signal)
u(s) = manipulated variable
l(s) = load disturbance
y(s) = process output
ym(s) = measured output
Transfer functions:
gc(s) = controller
gv(s) = valve
gp(s) = process
gm(s) = measurement
gCL(s) = closed-loop
gd(s) = disturbance
Calculations:
y(s) = l(s)gd(s) + u(s)gp(s)
u(s) = c(s)gv(s)
c(s) = e(s)gc(s)
e(s) = r(s) – ym(s)
ym(s) = y(s)gm(s)
Lump all expressions together, we can get the following:
y(s) = l(s)gd(s) + c(s)gv(s)gp(s)
y(s) = l(s)gd(s) + e(s)gc(s)gv(s)gp(s)
y(s) = l(s)gd(s) + (r(s) – ym(s))gc(s)gv(s)gp(s)
y(s) = l(s)gd(s) + (r(s) – y(s)gm(s))gc(s)gv(s)gp(s)
then:
If there is no disturbance:
 Equation (2)
Equation (2) Equation (3)
Equation (3)
No comments:
Post a Comment